Liên hệ ngay:
- Hotline/Zalo: 0931.317.431
- Dịch vụ bảo dưỡng: 0901.729.730
- Thiết bị chẩn đoán: 0903.621.264

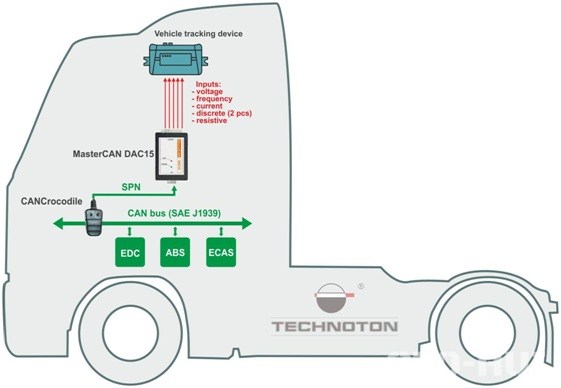
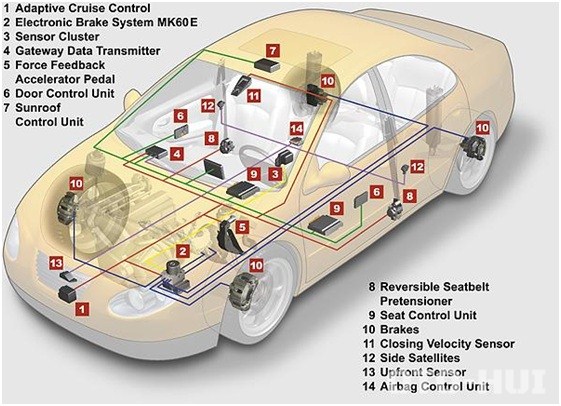
CAN cho phép các mô-đun điều khiển của các hệ thống khác nhau có thể chia sẻ dữ liệu và tương tác theo cách mà trước đây không thể. Các mô-đun này sẽ sử dụng một mạng lưới dây dẫn và mạch điện chung gọi là “Data Bus” để có thể giao tiếp và trao đổi thông tin cho nhau. CAN cho phép bộ điều khiển (PCM), bộ điều khiển ABS / ESC/ bộ điều khiển trợ lực lái, bộ điều khiển hệ thống treo điện tử, bộ điều khiển hệ thống điều hòa và hàng chục các hệ thống khác có thể kết nối với nhau.
1. Sự phát triển của mạng giao tiếp CAN trên ô tô.
CAN đã được tạo ra vào năm 1984 bởi Robert Bosch Corp với dự đoán về sự phát triển trong tương lai của các thiết bị điện tử trên máy bay. Mạng giao tiếp được sản xuất đầu tiên và ứng dụng trên ô tô vào năm 1992 trên một số mẫu xe của Mercedes-Benz. Ngày nay, các xe đời mới hầu như đều được trang bị hệ thống này.
2. Tốc độ truyền tải dữ liệu trong CAN.
Giống như nhiều xe hiện tại, thông tin trong những chiếc xe được trang bị mạng giao tiếp CAN sẽ được truyền trực tiếp. Hệ thống truyền tải dữ liệu có thể có một hoặc hai dây. Nếu nó có hai dây thường được xoắn để loại bỏ hiện tượng nhiễu điện từ. Tốc độ truyền tải thông tin sẽ thay đổi tùy thuộc vào loại xe cũng như kiểu mạng giao tiếp.
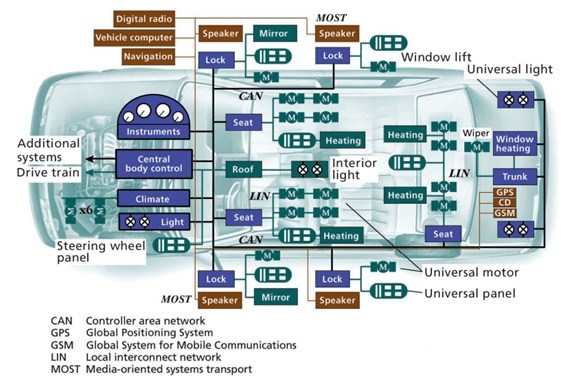
+ Hệ thống truyền tải thông tin loại A có tốc độ tương đối chậm, mạch truyền dữ liệu thường có tốc độ dưới 10 Kbps. Hệ thống này sẽ được sử dụng cho các hệ thống như điều chỉnh gương bằng điện, ghế điện, cửa kính điện, khóa cửa điện, mở cốp từ xa và đèn.
+ Hệ thống truyền tải thông tin loại B có tốc độ truyền từ 10 Kbps lên đến 125 Kbps, tùy thuộc vào giao thức điều hành (SAE J1850 hoặc theo tiêu chuẩn ISO 9141-2 của châu Âu). Tốc độ này đủ nhanh để mang những thông tin phức tạp và dữ liệu cần sự nhanh nhạy. Hệ thống này sẽ được sử dụng để chia sẻ thông tin của các hệ thống như: điều khiển hộp số tự động, hệ thống an ninh và điều hòa không khí.
+ Hệ thống truyền tải thông tin loại C có tốc độ nhanh nhất. Tốc độ có thể lên tới 1 Mgbps cũng có xe chỉ đạt 500 Kbps, tốc độ này đủ nhanh để truyền dữ liệu của PCM, mô-đun túi khí, hệ thống chống bó cứng phanh và hệ thống cân bằng điện tử.
3. Gửi và nhận dữ liệu trong CAN.
Mỗi mô-đun trong mạng lưới CAN đều có khả năng gửi và nhận tín hiệu. Mỗi mô-đun đều có một địa chỉ duy nhất riêng của mình trong mạng CAN. Điều này cho phép các mô-đun có thể nhận được tín hiệu đầu vào và dữ liệu cần thiết để hoạt động, trong khi bỏ qua thông tin dành cho các mô-đun khác mà cũng được chia sẻ lên mạng CAN. Khi một mô-đun gửi thông tin lên mạng CAN, thông tin này sẽ được mã hóa để các mô-đun khác nhận ra nó đến từ đâu.
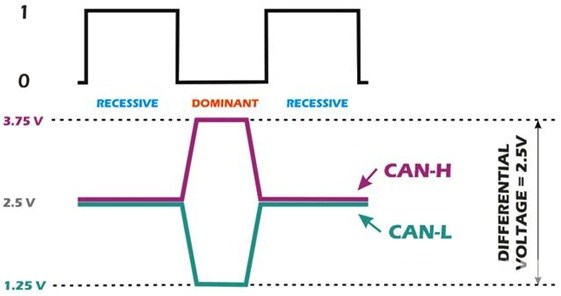
Dữ liệu được truyền đi dưới dạng bit bao gồm chữ số "0" và "1". Nếu bạn nhìn vào các dữ liệu trên một máy đọc xung, bạn sẽ thấy dạng xung vuông thay đổi khi điện áp cao và thấp. Giá trị điện áp thấp thường tương ứng với "0" trong khi giá trị điện áp cao tương ứng với "1". Các giá trị điện áp thực tế sẽ khác nhau tùy thuộc vào ứng dụng và giao thức mà nhà sản xuất xe đang sử dụng, nhưng hầu hết điện áp sẽ nằm trong khoảng 5-7 V.
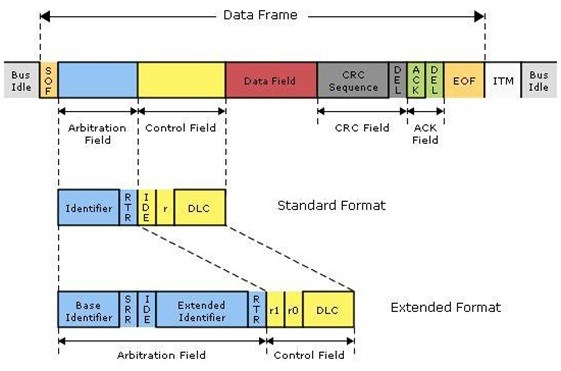
Mạng CAN tiêu chuẩn đòi hỏi một định dạng "khung cơ sở" cho dữ liệu. Điều này có nghĩa là đối với mỗi tín hiệu riêng biệt được gửi hoặc nhận bởi một mô-đun trên CAN, có một bit bắt đầu (gọi là bit "bắt đầu khung" hoặc bit "bắt đầu thông báo"), tiếp theo là mã "định danh" (mã bao gồm 11 bit cho biết kiểu dữ liệu được truyền tải), tiếp theo là một mã ưu tiên (mã "yêu cầu truyền tải từ xa") cho thấy tầm quan trọng cả dữ liệu, tiếp theo là 0-8 byte (một byte bằng 8 bit) dữ liệu thực tế, tiếp theo là một số bit xác nhận thông tin, và cuối cùng là một bit kết thúc.
Một trong những nhiệm vụ của bất kỳ mạng giao tiếp nào đó là giữ tất cả các dữ liệu tách rời nhau. Thông thường các mô-đun kiểm soát thân xe hoặc cụm đồng hồ taplô sẽ được giao nhiệm vụ quản lý lưu lượng mạng CAN. Khi thấy một dữ liệu được gửi lên CAN, nó sẽ nhìn vào bit đầu tiên của dữ liệu. Nếu bit đầu tiên là "0", thì dữ liệu này sẽ được ưu tiên hơn các dữ liệu khác.
Nếu bit đầu tiên là "1" nó sẽ được ưu tiên thấp hơn. Như vậy, những dữ liệu được ưu tiên cao luôn được gửi đến các địa chỉ trước, còn những dữ liệu được ưu tiên thấp có thể tạm thời bị chặn cho đến khi lượt gửi dữ liệu trên mạng giao tiếp CAN giảm.
4. Những hư hỏng của mạng giao tiếp CAN.
Mặc dù hệ thống CAN sử dụng dây điện ít hơn nhằm giảm trọng lượng và chi phí, nhưng nó cũng sử dụng nhiều mô-đun phức tạp hơn. Vấn đề truyền tải dữ liệu có thể xảy ra nếu giắc cắm trên mô-đun bị ăn mòn hoặc lỏng lẻo, hay bị chập cháy. Một số mô-đun thậm chí có thể mất bộ nhớ nếu bình ắc quy hết điện hoặc không được kết nối với hệ thống điện. Và bạn cần dùng một máy chẩn đoán để nạp lại chương trình cho bộ điều khiển thì mới có thể hoạt động lại.

Một trong những tính năng của CAN là mô-đun có thể gửi và nhận được tín hiệu "ok" để báo cho các mô-đun điều khiển chính biết chúng có đang làm việc hay không. Về lý thuyết, điều này làm cho việc chẩn đoán dễ dàng hơn. Mặt khác, nếu một mô-đun hư hỏng có thể khiến cả mạng lưới các mô-đun bị tê liệt và không hoạt động.
Khi một vấn đề về truyền tải dữ liệu xảy ra, hệ thống sẽ thiết lập một mã lỗi (DTC) và kích hoạt đèn báo. Tùy thuộc vào mã lỗi, chiếc xe có thể có hoặc không thể khởi động, hoặc nó chỉ có thể hoạt động và bị tắt máy ngay khi lên ga. Mất liên lạc giữa bộ điều khiển động cơ và bộ điều khiển hộp số (ví dụ mã lỗi U1026 trên GM) có thể khiến hộp số chỉ chạy được ở 1, 2 số.
Mất mã liên kết có thể chỉ ra vấn đề ở hệ thống dây điện của CAN, hoặc mô-đun bị lỗi. Tất cả các mô-đun trong CAN cần ba yếu tố để hoạt động chính xác: nguồn điện, nối mát và kết nối dữ liệu liên tục. Khi chẩn đoán các vấn đề của CAN, bạn thường bắt đầu bằng cách kiểm tra điện áp tại các mô-đun, sau đó là kiểm tra nối mát, và cuối cùng là kiểm tra dòng dữ liệu. Nếu cả ba đều tốt, nhưng các mô-đun không hoạt động, thì mô-đun cần phải được thay thế.
Để bảo vệ bình ắc quy khi xe tắt, một tín hiệu "ngủ" sẽ được gửi đến các mô-đun trong CAN. Một số có thể vẫn còn hoạt động trong một khoảng thời gian ngắn sau khi xe tắt (mô-đun túi khí), và một số không bao giờ tắt (mô-đun hệ thống chống trộm và mô-đun chìa khóa thông minh), nhưng hầu hết các mô-đun sẽ đi “ngủ” để tiết kiệm pin. Nếu tín hiệu “ngủ” không được gửi đi, hoặc các mô-đun không nhận dạng được tín hiệu “ngủ” thì bình ắc quy sẽ nhanh hết điện và bạn sẽ sớm phải sạc bình hoặc thay thế bình ắc quy mới.
Nguồn: oto-hui
